Practice Questions
Lighting
Consider a point P on a flat surface, as shown on the right. Let l⃗ be the unit vector pointing to the light source, r⃗ the unit reflection vector, v⃗ the unit vector pointing to the viewer and n⃗ the unit surface normal vector at P
- How must the flat surface be tilted so that the point P has the maximum intensity diffuse reflection.
Assume the light source and the viewer remain fixed. How must the flat surface be tilted so that the viewer receives the maximum intensity specular reflection from point P?

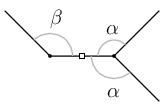
Articulation
Consider the articulated model “bug” illustrated below, where two arms
move together (controlled by angle α), and the third is controlled by angle
β. Suppose you have a function
drawSegment() that draws a segment from (0, 0) to (1, 0), and
functions rotate(angle), translate(x,y),
pushMatrix() and popMatrix() that manipulate
the model matrix. Give pseudocode to draw the model with the origin
marked by ▫, and rotation about that centre
defined by a third angle γ; in the
illustration γ = 0. You may assume
all segments are unit length.
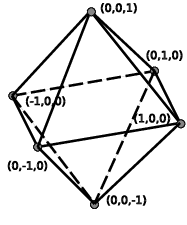
Textures
Give a mathematical function to map the surface of the regular octahedron onto texture coordinates 0 ≤ s ≤ 1, 0 ≤ t ≤ 1, so that the surface is covered by exactly 2 copies of the texture.
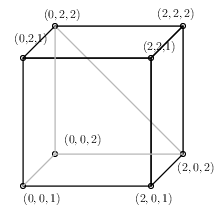
Interpolation
Suppose the near clipping plane is at z = 1. Consider the perspective projection of the triangle (0, 2, 2)(2, 0, 2)(2, 2, 2). Will it make a difference if interpolation is done before or after projection for this triangle? Why or why not?